
Moja przygoda z żyrardowskimi rotorami firmy SPID Elektronik rozpoczęła się ponad 2 lata temu. Poszukiwałem nowego rotora, który miał spełniać następujące warunki: możliwość zdalnego sterowania, śledzenie azymutu oraz liniowy obrót – w celu rysowania charakterystyk antenowych. Stary maszt z AR-303 przeżył już wiele i średnio sobie radził z potężną, ponad 5-metrową anteną. W lato 2013 roku zamówiłem rotor RAU w cenie 999 zł. Miał to być mój nowy, długo oczekiwany rotor dla Körnera 19.3.
Po zakupie od razu zauważyłem dwie rzeczy:
- rotor zakłóca radio podczas pracy, użyto w nim zwykły silnik szczotkowy,
- obrót jest ciągły – rotor nie posiadał krańcówek uwzględnionych w zamówieniu.
Błędy mogą zdażyć się każdemu, zatem odesłałem rotor na mój koszt w celu montażu krańcówek. Problem z zakłóceniami jednak pozostał. Docelowo chciałem postawić antenę tuż nad rotorem, ze względu na jej ogromny rozmiar i opory powietrza, które byłyby potęgowane przez dodatkowy maszt bez dodatkowego łożyska. Impulsowe zakłócenia zniechęciły mnie do montażu, ponieważ antena znajdowałaby się blisko silnika. Postanowiłem znaleźć kogoś, kto podmieniłby silnik na bezszczotkowy i uzgodniłem z producentem, że jego zmiana nie wpłynie na gwarancję. Zakłócenia oczywiście nie są bardzo silne, ale w przypadku dość szerokiej modulacji jaką jest WFM na paśmie UKF, są one dobrze słyszalne na słabszych sygnałach na wsi z dala od lokalnych zakłóceń, szczególnie w stereo.
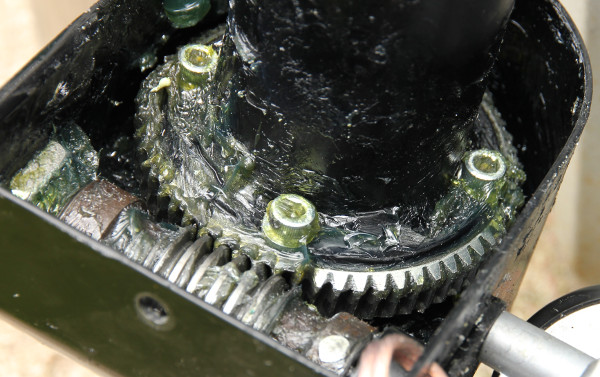
Po zajrzeniu do wnętrza rotora, okazało się, że wersja “wzmocniona” posiada jedynie jedną mosiężną ślimacznicę (mała z wbudowanymi magnesami, widoczna na innym zdjęciu na końcu artykułu). Duża przekładnia, kręcąca bezpośrednio masztem, posiada ślimak i zębatkę wykonaną ze stali. Mimo wszystko rotor sprawia wrażenie dość porządnie wykonanego pod względem mechanicznym, jeżeli chodzi o przekładnię.
Rotor przeleżał w domu miesiąc, dwa, trzy… i przyszła zima, a wraz z nią głębokie niże z silnymi wiatrami. Obecny wtedy maszt został naruszony pod wpływem silnych porywów wiatru (110 km/h) i delikatnie się ugiął ponad łożyskiem (nierdzewna rurka 38x1mm, która wystawała aż 1,5 metra wytrzymała w sumie ponad 4 lata). Rotor AR-303 na wiosnę uległ uszkodzeniu z powodu większego obciążenia. Postanowiłem postawić nowy maszt, wytrzymalszy i wizualnie ładniejszy o którym od zawsze marzyłem. Tak oto powstał 10-metrowy maszt o podstawie 6m 60,3×2 + 3m 50,8×2 i częscią obrotową 1m 33,7×2 + 1,5m 38×2 (1m ponad łożyskiem) oraz kolejnym rotorem AR-303.
Od tamtej pory porzuciłem myśl o zmianie rotora z AR-303 na RAU, ponieważ zrobiłem także prosty sterownik na przekaźnikach, umożliwający zdalne sterowanie. Kierunek anteny mogę ustalić na podstawie (semi-) lokalnych stacji, ponieważ rozdzielczość pomiaru sygnału w zmodyfikowanym tunerze XDR-F1HD jest bardzo dokładna, rzędu dziesiętnych części dB. Liniowość obrotu dodatkowo poprawiłem podwyższając napięcie AR-303 z 18 na 24V.
W zeszłym roku zainteresowałem się nasłuchem sieci WiFi w paśmie 5 GHz poprzez dukty mikrofalowe na odległości rzędu kilkuset kilometrów. Rotor RAU przeleżał dwa lata w domu i wreszcie postanowiłem zrobić z niego użytek. Szerokopasmowe zakłócenia impulsowe generowane przez szczotki są najsilniejsze na niskich pasmach radiowych. Przy częstotliwościach rzędu GHz ten problem nie istnieje. Podczas testów “na biurku” zauważyłem, że w zależności od kierunku obrotu, silnik bierze chwilami nawet 1,5x większy prąd, ale podejrzewałem, że musi się poprostu “dotrzeć”. Rozciąłem maszt i zamontowałem RAU, dodatkowo uszczelniając go częściowo z zewnątrz silikonem. Wymieniłem również śruby mocujące rury na nierdzewne. Grid na 5 GHz który zamontowałem, wydaje się być małą antenką względem np. ogromnych 19-elementowych Yagi na UKF. Jego waga to tylko 3,3 kg, a rozmiar 90 x 70 cm. Zatem biorąc pod uwagę przeznaczenie rotora powinien on w takiej konfiguracji bezproblemowo służyć przez lata…


Początkowo rotor sterowałem z akumulatora 12V, ale bardzo szybko udało mi się wykorzystać jego początkową wadę jako zaletę. Szczotkowy silnik na prąd stały umożliwia bardzo łatwą regulację szybkości obrotu. Zrobiłem prosty sterownik na Arduino wykorzystując PWM. Dzięki temu mogłem zejść z szybkością do ok. 1° na sekundę przy wypełnieniu ⅓ i mniej. Pierwsza próba sterownika była średnio udana, ponieważ bardzo szybko okazało się, że wychodzący kabelek uziemiający w rotorze to uzwojenie silnika. I tak oto pierwszy obrót z mojego sterownika zakończył się przepuszczeniem kilku amperów przez porty USB w laptopie i upalniem cewki separującej masę cyfrową od analogowej w tunerze radiowym. :-) Wszystkie kable antenowe wchodzące do domu są podłączone do uziemienia i w taki sposób zamknął się obwód między silnikiem a sterownikiem przez laptopa i radio powodując chwilowe zwarcie. Na szczęscie udało mi się odłączyć uziemienie uzwojenia silnika w rotorze z dachu, bez konieczności opuszczania całego masztu w dół. Laptop także nie ucierpiał.
Nie będę ukrywał, że rotor był dość mocno eksploatowany. Podczas tropo na GHz używałem go prawie cały czas. Jednak starałem się również zapewnić mu jak najlepszą żywotność. Pierwszą funkcją zaimplementowaną w moim sterowniku był miękki start – tzn. stopniowe zwiększanie wypełnienia PWM przez ok. sekundę do zadanej wartości, aby łagodnie rozpoczynać obrót. Dodałem także zabezpieczenie przed nagłą zmianą kierunku obrotu. Jego zmiana odbywa się dopiero po sekundzie od zatrzymania rotora. Kierunkowość anteny o zysku rzędu 30 dBi jest bardzo duża, wstępnie oszacowałem ją na niecałe 3° dla -1 dB. Z tego względu, rotor używałem prawie zawsze z wypełnieniem PWM rzędu 30-40%, czyli z szybkością wielokrotnie mniejszą, niż przewidzianą przez producenta. Dużym plusem było również to, że rotor był bardzo cichy. W budynku zupełnie nie słyszałem jego pracy. W całkowitej ciszy mogłem usłyszeć jedynie efekt użycia PWM-u, który znacznie wyciszyłem zwiększając częstotliwość do ok. 4 kHz.
Zastosowany mechanizm do śledzenia azymutu rotora to kontaktron dający impuls co jeden stopień obrotu. Ustalanie kierunku anteny było jednym z największych problemów mojego sterownika, ponieważ pozycja się rozsynchronizowywała. Błędy w implementacji programu zostały wykluczone, a jedyne co przychodziło mi do głowy to jakieś zakłócenia. Jednak po położeniu masztu okazało się, że przyczyną jest problem w konstrukcji, o którym szczegółowo za chwilę.
Rotor powiesiłem na przełomie lipca i sierpnia. W listopadzie prawie go nie używałem ale zauważyłem coraz głośniejszą pracę, nawet przy wypełnieniu PWM rzędu 50%. To była ostatnia chwila, aby położyć maszt przed zimą i sprawdzić co się stało. Okazało się, że zardzewiało łożysko kulkowe silnika od strony ślimacznicy, ponieważ dostała się do niego woda. Jak już wcześniej wspomniałem, podczas montażu miałem duże obawy, ponieważ obudowa rotora miała niepełne uszczelnienia. Jak widać, mój niepokój był słuszny… Rozwikłała się także sprawa błędnego śledzenia azymutu rotora. Zębatka z magnesami i kontaktronem dostała dużego luzu po-osiowego. Plastikowa osłonka jest jednocześnie panelem do podłączenia kabli po drugiej stronie. Tutaj ujawnił się znaczący błąd konstrukcyjny. Miedziane nity, przechodzące na drugą stronę były zwierane przez metalową zębatkę!

Zatem podsumowując, przez zaledwie cztery miesiące w rotorze “uszkodził się” mechanizm odczytu azymutu, zębatka z magnesami i kontaktronem wyrobiła duży luz, a łozysko zardzewiało z powodu słabo przemyślanej konstrukcji i pomimo moich prób uszczelenia rotora w miejscach potencjanie zagrożonych wchlapywaniem wody. Po wielodniowej naprawie udało mi się przywrócić rotor do stanu użyteczności. Łożysko zostało wymienione na nierdzewne, a luz został zredukowany poprzez wytoczenie dodatkowego pierścienia. Cały rotor został również przekonserwowany i bardzo dokładnie uszczelniony, element po elemencie. Co więcej, udało się wyrównać obrót. Poprzednio przy przy niskich wartościach wypełnienia PWM rotor zatrzymywał się w wielu miejsciach przy bardzo niskiej prędkości. Obecnie nie ma problemu, aby uzyskać szybkość rzędu ułamka stopnia na sekundę!
Przez zimę nie miałem żadnych problemów z rotorem RAU, ale bardzo rzadko go używałem. Mam nadzieję, że po tych dodatkowych naprawach i modyfikacjach będzie się już dobrze sprawował.